
 资讯
资讯
闭上眼,给(gěi)你不(bú)一样的(de)感觉,现在(zài)AI人工智能软体机器人(rén)可(kě)以给到你。
现在科技越来越(yuè)发达,传统机械化操(cāo)作的机器人已(yǐ)经不(bú)能满足现(xiàn)在人类快速的(de)发(fā)展,随着科技的不断发展,科研人(rén)员通过自然界的软体生物和传统机器(qì)人(rén)的启发,陆续(xù)有人创造出对人类快速发展的(de)软体机器人,他们(men)可以去到很多人类去不到的地方,他们的身体柔软度,给(gěi)经济带来进一步的发展。
软(ruǎn)体机器人(rén)模(mó)仿(fǎng)章鱼,象(xiàng)鼻,海星等动物而设计,栩栩如(rú)生,他(tā)们(men)由软材(cái)料(硅胶,橡胶)构成,有着天生优良的环(huán)境适应性以及安全交(jiāo)互性。但是相比于传统(tǒng)机器人,软体机器人(rén)的“感知”能力还(hái)远远不足(zú)。要真正做出“富有生(shēng)命”的软体机器人,有效的(de)传感是必不可(kě)少的(de)。我们人类或者动物的肌肉纤维里缠绕着(zhe)神经纤(xiān)维,从而可以直接感知肌肉的变形,我(wǒ)们称之(zhī)为(wéi)“本体(tǐ)感(gǎn)知能力”。
1. 软体机(jī)器人(rén)的传感
软体机器人虽然适应性环境能力强,可(kě)以和人安全交(jiāo)互,但是为了(le)能够真正在生活生产中应用,能感知外界环境实为关键,有(yǒu)了传感(gǎn)信息(xī),机器(qì)人才(cái)能(néng)做(zuò)出(chū)相应的(de)对策,或者(zhě)检验任务(wù)是否(fǒu)已经完成。毫不夸张的说,如果(guǒ)没有有效(xiào)的可(kě)靠的传感方案,软体机器人只(zhī)能(néng)被限制在实验室中做(zuò)做展示(shì)了。

对于传(chuán)统机器人来说,机器人是由刚性的杆(gǎn)件和旋转关节构(gòu)成,用旋转编码器(qì)得到关(guān)节(jiē)转(zhuǎn)角就可以计算(suàn)出来当前(qián)机器人的姿态。

但是软体机(jī)器人(rén)而言(yán),材料柔软的特性让软(ruǎn)体机器人本(běn)体的(de)形状变得极难(nán)预测,尤其是受到外力影响的情况下。科学家们(men)已经设计出多种有效的(de)软(ruǎn)体机器人传感(gǎn)器(例如(rú)液态金属,光纤,导电聚合物)。想要完(wán)全(quán)的表征(zhēng)一个软体机器人的形变信息,仅仅依靠一两条(tiáo)/片传感(gǎn)器是比较难实现的,需要更复杂更科学的传感器分布设计。目前的大(dà)多数(shù)研究都是根据经验人为(wéi)的对(duì)传感(gǎn)器的分布(bù)进行设(shè)计,考虑到软体机器人的“多自由度特(tè)性”的复(fù)杂性(xìng),人为的(de)设计传感器的尺寸和分布会越来越艰难。

来自迪士尼研究院(Disney Research)以及雷伊·胡安·卡洛斯(sī)大(dà)学(UniversidadRey Juan Carlos)的科学家(jiā)们尝试设(shè)计出一(yī)种传感器系统来重构软(ruǎn)体机器人的本(běn)体,他们指出,传(chuán)感器(qì)的数量,以及放置传感器的(de)最佳位置是两(liǎng)个重要的(de)问题。研究者(zhě)们(men)提出了一种(zhǒng)算法技术(shù),可以由软(ruǎn)件自动地(dì)设计“拉伸型传感(gǎn)网络”的尺寸和分(fèn)布,从而为任意形(xíng)状(zhuàng)和尺寸的软(ruǎn)体机器(qì)人增(zēng)加“本(běn)体感受(shòu)”的能力。他(tā)们的方法已经能够让软体机器人(rén)感受自身(shēn)的变形(xíng)状态(tài)以及感(gǎn)受在外界(jiè)交互下的形变。
在该研究中(zhōng)给出了三(sān)个具有本体(tǐ)感(gǎn)知能力的应用(yòng)实例,一(yī)个长方体的(de)弹性棒,一个(gè)气动的软(ruǎn)体机(jī)械手(shǒu)指,还有一章鱼触手(只有仿真)。我们先来欣赏一下这几种软体(tǐ)机器人例子。
长方体棒展示
软体手指(zhǐ)展示
章鱼触手(仿(fǎng)真)展示

我们(men)的(de)肌肉(ròu)纤维上缠(chán)绕了一圈圈的神经纤(xiān)维,它(tā)们可以检测肌肉的长度变化啊(ā),从而让(ràng)我们(men)感知身(shēn)体每一处的姿势。在这个研究中,科学家(jiā)们采(cǎi)用了(le)一种类似的设计方法,他们用一种常见的应(yīng)变传感器单元,这(zhè)种传(chuán)感(gǎn)器(qì)是(shì)由弹(dàn)性的空(kōng)心硅(guī)胶管制成,在里面充满(mǎn)了(le)共晶镓-铟(EGaIn,一种液(yè)态合金)。该传感(gǎn)器的(de)建模相对比(bǐ)较简单,可以通过计算硅胶管长度/截面(miàn)的变化来(lái)计算电阻的变化。研究者(zhě)们(men)把(bǎ)大量的(de)这种(zhǒng)细长的传(chuán)感器(qì)作为(wéi)一个个类似于神经纤维的单(dān)元集成到软体机器人身体里(通常是用硅胶浇注法,在后文(wén)中的气动(dòng)软体驱动器中有介绍具体制造(zào)方法)。
弹性(xìng)应变传感器
2. 传感器网络优化(huà)的算法
为了让大量(liàng)的传感(gǎn)器最优化分布,研究者(zhě)们提出了一种用于优化应变传感器分布和(hé)尺寸设计(jì)的算法。
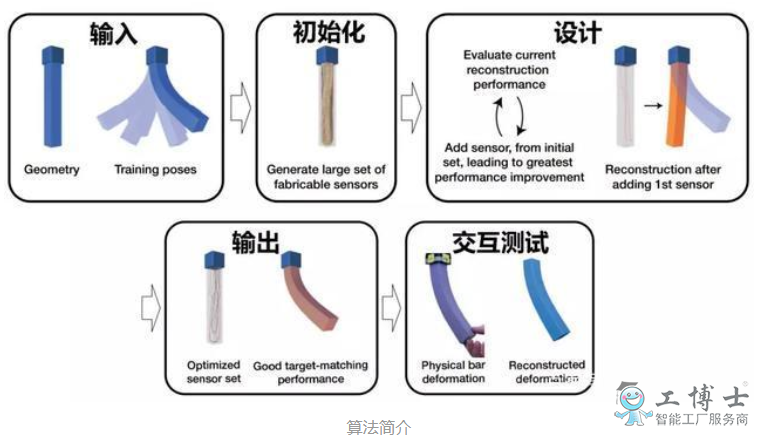
首先是(shì)要(yào)在计算机(jī)中设计出软体机器人弹性体的几何(hé)模型,然后利用这(zhè)个模型进行一系列的不同形态的模拟(nǐ)交互训练。接下来研(yán)究(jiū)者根据交互训练中弹性(xìng)体的应变场分布(应变场分布有模拟交互得到)来生成一(yī)大组可以选择的合(hé)理的传感器路(lù)径,这些传感器路径对于外界的输入都(dōu)非常敏感(研(yán)究(jiū)者发现(xiàn),在(zài)最开始(shǐ)集成(chéng)200个候选(xuǎn)传感器(qì)足以在各个不同的(de)方向表示物体)。接着(zhe)通过连续(xù)迭代优化算法来选(xuǎn)出最优的一组传感器分布(bù)的方式(shì),从而大量的减少传感器的(de)数量(liàng)。最终(zhōng)根据(jù)得到的传(chuán)感器路径来制造样(yàng)机进行测试(shì)。

传感器路(lù)径的选择(zé)
关于传感器路径(jìng)的选择(zé),研究者制定了(le)三个约束(shù):1. 选择的路径一定(dìng)要是可以被加工的;2. 路径一定要有(yǒu)一定的随机性;3. 每一个(gè)传(chuán)感器一定要跟随着应变场,从而(ér)能够最(zuì)大化传(chuán)感器的敏感度(dù)。

传感器数量筛(shāi)选算法
为了从初始(shǐ)组合200个传感器中筛选出最(zuì)好的一组传感器,研究者使用一阶优化(huà)约束算法(fǎ)来实现传感(gǎn)器最优组合(hé)的筛(shāi)选。
3. 本体感知(zhī)传感器设计应用(yòng)案例
如(rú)前(qián)面动态图(tú)所展示的,作者通过两(liǎng)个实体的例子和一(yī)个仿真的例子来展(zhǎn)示他们(men)算(suàn)法(fǎ)的可(kě)行(háng)性。
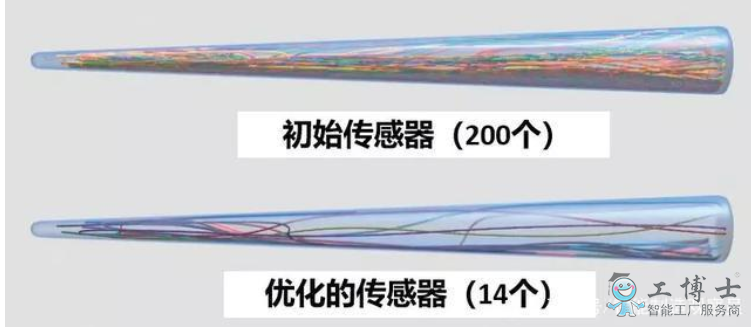
首先是(shì)一个可以多(duō)向弯曲(qǔ)的弹性(xìng)棒。弹性(xìng)棒的一被固(gù)定,另一端和外界有交互(用手指控制它朝着各(gè)个方(fāng)向弯曲)。研究(jiū)者利用算法(fǎ)把(bǎ)200个初始的(de)传感(gǎn)器网络(luò)缩减到(dào)了只含有5个传感器的(de)最优组网络分布。仅仅借助于这5个传感器的信息,就可以重构该(gāi)弹(dàn)性棒(bàng)在相应的(de)外界作(zuò)用下(xià)的变(biàn)形(xíng)情况(kuàng),重构效果有(yǒu)着惊人的(de)准确度。

初始传(chuán)感器组(zǔ)和优化的(de)传感器组

实体交互展示和对应(yīng)的模型(xíng)重构
除了简单的(de)实心的棒,有气腔的复杂的气动软体驱(qū)动器也(yě)可(kě)以用这种方式来实现(xiàn)本(běn)体感知(zhī)的效果。针对于一个常(cháng)见(jiàn)的(de)半(bàn)圆形截面的(de)气动软体手(shǒu)指,研究(jiū)者先用(yòng)算法在气腔周围生(shēng)成了200个可制造的传感器网络,然后用(yòng)优化模型缩减(jiǎn)到(dào)仅剩9到10个(gè)传感器网络。

初始传感器分布和(hé)优(yōu)化后的传感器分布
为了均衡制造难度(dù)和精确性,研究(jiū)者们最终采用了6个(gè)传感(gǎn)器的设计。下图给出了集成传感器的软体机器人的(de)制造方式。3d打(dǎ)印出传感器网络的模(mó)具,用硅(guī)胶铸(zhù)模的方式,在(zài)驱动器表明(míng)留下细(xì)小的凹槽,把空心硅胶管铸进去,然后再铸(zhù)一层硅胶来(lái)固定空心硅胶管,最(zuì)终在硅胶(jiāo)管(guǎn)里注入液态金属,接上导线,即可得到一个“本(běn)体感(gǎn)知”的软体驱(qū)动器(qì)。
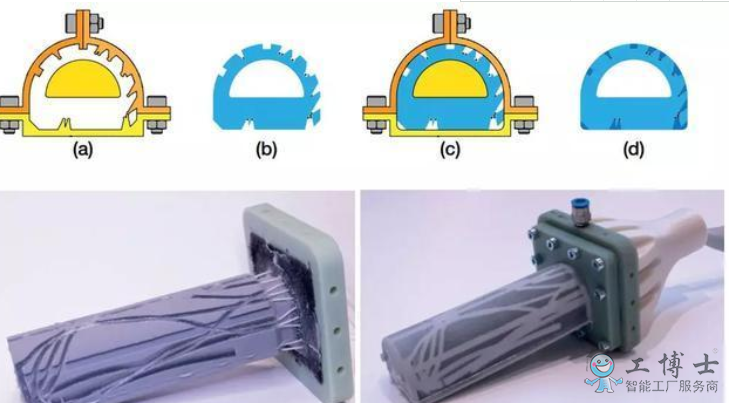
带有本体感(gǎn)知能力软体驱动器的加工
研(yán)究(jiū)者用(yòng)两种不同的变形模式来(lái)检(jiǎn)验本体感知的性能(néng)。一(yī)个(gè)是自由膨胀,另一个是在膨胀过程中受到圆(yuán)柱体的(de)阻(zǔ)挡。可以看(kàn)出(chū),图中显示了实体的(de)变形和(hé)重构的模型有(yǒu)着良好的重叠(dié)性。

自由充气形变和(hé)被阻挡的充气形(xíng)变
为了(le)验证所提出(chū)的(de)方法也适用于(yú)仿生(shēng)机器人设计,研究者仿真了(le)一个章鱼触手。优化(huà)后的结果(guǒ)能够准确的重构章(zhāng)鱼触(chù)手在复杂的外界接(jiē)触的模(mó)型(颜色代表模拟(nǐ)值和重构值之间的误差)。
章鱼触(chù)手(shǒu)传感器数量的优化
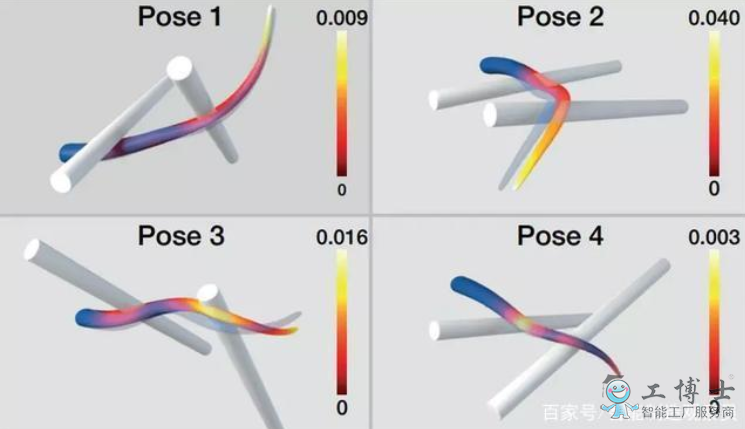
仿真模型和(hé)重(chóng)构模型对比
4. 总结(jié)与展望
集成本体感知能力让本来就具有众多优良性能的软体机器人变得更加强大。当一个软体(tǐ)机械(xiè)手具(jù)有了(le)本体感知(zhī)能力,它不仅仅能够感(gǎn)知一个(gè)物(wù)体是否被抓起,更能够直接感知所抓起物(wù)体的形状。本研究中的科(kē)学家们提出的传(chuán)感器的设计及优化的方法(fǎ)能够很好地(dì)重(chóng)构软(ruǎn)体(tǐ)机器人的状态,从而进(jìn)一步提升了(le)软体机器人的可靠性以及实用(yòng)性。能够(gòu)对于外界的交互(hù)进行感知,让软体机(jī)器人如虎添翼,相信(xìn)在不久的将来,软体机器人会(huì)逐步走(zǒu)入(rù)大家的生(shēng)活。
软体机器人已经(jīng)有了(le)进一步的突破,但目前还(hái)是有很多(duō)的不足需要改进,我(wǒ)相信,在未(wèi)来的不断研究(jiū)中,可(kě)以创造(zào)出能像人一样的软体机器人。










络警察")
信息")
良信息(xī)举报中心")
络(luò)110")