
 资讯(xùn)
资讯(xùn)传统(tǒng)意义上的(de)机(jī)器人,由许多(duō)复杂的部件组成(chéng),其中任何一个部件发生故(gù)障都可能使整个(gè)机器(qì)人停止工作。发(fā)表(biǎo)在顶级学(xué)术期刊《自然》(Nature)的封(fēng)面(miàn)论(lùn)文论证了(le)一种崭(zhǎn)新(xīn)的机器人设计思(sī)路:用多个(gè)彼此独立的粒子单元组(zǔ)成机(jī)器人(rén)系统,粒子单元的数量变化和(hé)故障不会对(duì)系统产(chǎn)生影响(xiǎng)。

粒子机器人系统(tǒng)

《自(zì)然》封面(miàn)图
该粒子(zǐ)机(jī)器人系统(particle robotics)由(yóu)相互独立的粒(lì)子单元松散连接(jiē)而成,可(kě)完成向目标光(guāng)源运动、躲避障碍物、转移物体等任务。由(yóu)于这种(zhǒng)特殊(shū)设计,粒子机器人系统具有传统机(jī)器人系统所没(méi)有(yǒu)的(de)灵活性、可扩展性和鲁棒性。鲁棒性(robustness)指(zhǐ)的是系统的健壮性,是在异常和危险情况下系统(tǒng)生存的(de)关键。
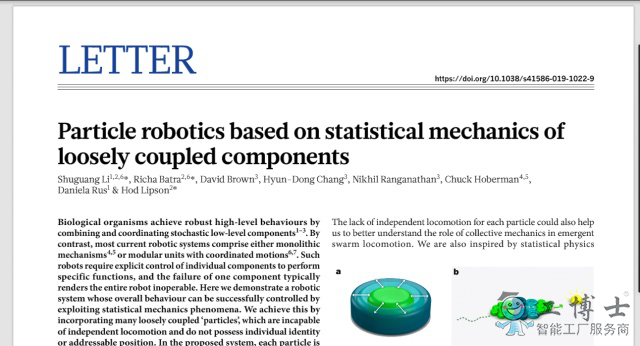
《自然》论文截图
值得注意(yì)的是(shì),粒(lì)子机器人系统中,没有一(yī)个粒子直接与另一个粒子通信或依赖于(yú)另一个粒子发挥作用。因此,即(jí)使(shǐ)在系统中添加或减少粒子,也不会对(duì)系统产生任何影响。研究人员(yuán)发现(xiàn),即使20%的粒子发生故(gù)障,系统也可以保持运动。这显示了粒子(zǐ)机器(qì)人在处理(lǐ)单个粒子单(dān)元故障时的稳健(jiàn)性。

粒子机(jī)器人系统躲避障碍物

粒(lì)子(zǐ)机器人系统向(xiàng)光源移(yí)动













